"Basic Control Theory - (2) - Proportional control, Integral control and Derivative control"
Reference, thanks and image credit to : Steam Engineering Tutorial,
Remark : All publications and images herein this page are for use of educational purpose only. The owner of this page is not responsible for the consequences in case of violation to copyright, trademark, patent or other intellectual property rights of any third party.
proportional control အေႀကာင္း၊ မ 'စ' ခင္ set point, process, process input, process output နဲ႔၊ error အစရိွတဲ႔၊ အေခါါအေဝါါ၊ အသံုးအနံွဳးေတြကို၊ ေဖာ္ၿပပါဦးမယ္။ 'set point (SP)' ဟာ၊ ပံုေသ static value သို႔မဟုတ္၊ ေၿပာင္းလဲေနမယ္႔၊ varying value လည္း၊ ၿဖစ္နိဳင္သလို၊ ရရိွလာမယ္႔ process out put နဲ႔၊ ကိုက္ညီရန္၊ လိုအပ္ပါတယ္။
ဥပမာ set point SP ကို၊ desired temperature အေနနဲ႔၊ ထားရိွတဲ႔အခါ၊ static value အၿဖစ္၊ သတ္မွတ္နိဳင္ၿပီး၊ desired position အေနနဲ႔၊ ထားရိွတဲ႔အခါမွာေတာ႔၊ varying value အၿဖစ္၊ သတ္မွတ္နိဳဳင္ပါတယ္။ 'process' ကို၊ plant သို႔မဟုတ္၊ system လို႔လည္း၊ ေခါါႀကၿပီး၊ controlled အေနနဲ႔ ထိမ္းေႀကာင္းရန္၊ အနည္းဆံုး input တခု၊ ရိွရန္၊ လိုအပ္သလို၊ measure အေနနဲ႔၊ ေစာင္႔ႀကည္႔ရန္၊ output တခု၊ ရိွရမွာလည္း၊ ၿဖစ္ပါတယ္။
ဥပမာ room heater တလံုးကို၊ process အေနနဲ႔ယူဆႀကည္႔လၽွင္၊ heater ရဲ႕ feed ဟာ၊ input ၿဖစ္ၿပီး၊ temperature ကေတာ႔၊ process output ၿဖစ္ပါတယ္။ 'process input' ဟာ၊ controller output သို႔မဟုတ္၊ controller variable (CV) တန္ဘိုးနဲ႔လည္း၊ တိုက္ရိုက္ဆက္သြယ္ေနပါတယ္။ 'process output' ကို၊ process variable (PV) သို႔မဟုတ္၊ measured variable (MV) အၿဖစ္၊ ေဖာ္ၿပႀကၿပီး၊ system output သို႔မဟုတ္၊ measurement လို႔လည္း၊ ေခါါႀကပါတယ္။
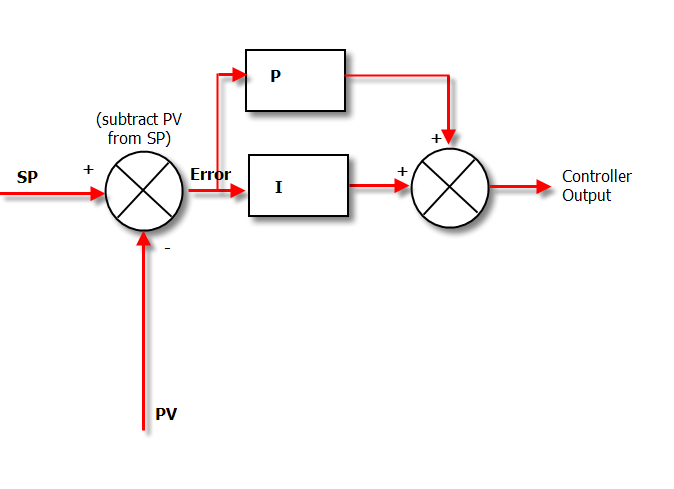
'error' ဆိုတာကေတာ႔၊ set-point တန္ဘိုးမွ၊ process output တန္ဘိုး၊ 'နွဳတ္ယူ' ၿခင္းၿဖင္႔၊ ရရိွလာမယ္႔၊ ပမာဏၿဖစ္ပါတယ္။ တနည္းအားၿဖင္႔ process ဟာ၊ မူလ ခၽိန္ညိွထားတဲ႔ desired set-point မွ၊ deviates အေနနဲ႔၊ ေသြဖီသြားမယ္႔၊ ပမာဏကို၊ ေဖာ္ၿပၿခင္းလည္း၊ ၿဖစ္ပါတယ္။ error တန္ဘိုး ရရိွမွသာ၊ controller ဟာ၊ process ကို၊ desired set-point သို႔၊ ႔ၿပန္လည္၊ ထိန္းေႀကာင္းေပးနိဳင္မွာၿဖစ္ပါတယ္။
error signal ကို၊ controllers ေတာ္ေတာ္မၽားမၽားမွာ၊ input signal အၿဖစ္၊ ၿပန္လည္အသံုးၿပဳႀကပါတယ္။ တခၽိဳ႕ controller ေတြမွာေတာ႔၊ proportional, integral and derivative parts လို႔ေခါါတဲ႔၊ set-point weighting ေတြ၊ အသံုးၿပဳထားတာ၊ ေတြ႔ရပါတယ္။ set-point weighting controller ေတြမွာ၊ set-point နဲ႔ measured value တို႔ကို၊ input (၂) ခု အၿဖစ္၊ အသံုးၿပဳထားၿပီး၊ 2 - DOF controllers ေတြလို႔၊ ေခါါႀကပါတယ္။
"Proportional control"
controller တလံုးရဲ႕၊ proportional action ကို၊ proportional gain အၿဖစ္၊ ရည္ညြွန္းေလ့ရိွပါတယ္။ proportional gain ဟာ၊ set-point (SP) နဲ႔၊ process output (PV) တို႔ႀကားမွ၊ ၿခားနားခၽက္ ၿဖစ္ၿပီး၊ error လည္းၿဖစ္ပါတယ္။ gain ကိုေတာ႔ သေက္တ K ၿဖင္႔၊ ေဖာ္ၿပသလို၊ controller ရဲ႕ output လည္း၊ ၿဖစ္ပါတယ္။
တနည္းအားၿဖင္႔၊ 'Controller output = K* error = K* (SP - PV)' ဆိုၿပီး၊ သတ္မွတ္နိဳင္ပါတယ္။ လက္ေတြ႔မွာေတာ႔၊ controller output ဟာ၊ အကန္႔အသတ္ limit ရိွရန္၊ လိုအပ္ၿပီး၊ controller ရဲ႕ own limitations ဒါမွမဟုတ္၊ actuator ရဲ႕ limitations အၿဖစ္၊ ထည္႔သြင္းထားပါတယ္။ controller ေတြမွာ maximum output (U max) နဲ႔၊ minimum output (U min) တို႔၊ ပါရွိပါတယ္။
measured variable ဟာ၊ increases အေနနဲ႔ 'ၿမင္႔' တက္လာၿပီး၊ controller output CV ကေတာ႔၊ decrease အေနနဲ႔ 'ကၽ' ဆင္းသြားၿခင္းကို၊ direct acting လို႔၊ ေခါါပါတယ္။ အလားတူ၊ measured variable ဟာ၊ decrease အေနနဲ႔ 'ကၽ' ဆင္းသြားၿပီး၊ controller output CV ဟာ၊ increases အေနနဲ႔ 'ၿမင္႔' တက္လာၿခင္းကိုေတာ႔၊ reverse acting လို႔ေခါါပါတယ္။ gain K ဟာ၊ positive value အၿဖစ္၊ ရိွေနတဲ႔အခါ၊ controller ဟာ၊ direct acting ၿဖင္႔၊ ေဆာင္ရြက္ၿပီး၊ အကယ္၍၊ gain K ဟာ၊ negative value အၿဖစ္၊ ရိွေနတဲ႔အခါမွာေတာ႔ reverse acting ၿဖင္႔၊ ေဆာင္ရြက္တယ္လို႔၊ ဆိုနိဳင္ပါတယ္။
proportional control မွ၊ controller output CV မွာ၊ error 'ရိွ' ေနမွာ၊ ၿဖစ္ပါတယ္။ set-point နဲ႔ measured value တို႔အႀကားမွ၊ offset ေႀကာင္႔၊ error 'ရိွ' ေနတာၿဖစ္သလို၊ offset ဖယ္ထုတ္ရန္၊ manual reset အသံုးၿပဳႀကပါတယ္။ proportional controller ေတြရဲ႕၊ အားနည္းခၽက္ကေတာ႔၊ error 'ရိွ' ေနၿခင္းၿဖစ္ပါတယ္။ ဥပမာအေနနဲ႔ tank အတြင္းသို႔၊ အရည္ fluid ၿဖည္႔သြင္းၿခင္းၿဖင္႔၊ ၿပန္လည္ေဖာ္ၿပပါ႔မယ္။
operator ဟာ၊ outflow 'ပို' အလိုရိွတဲ႔အခါ၊ outlet valve ကို၊ 'ပို' ဖြင္႔လိုက္မွာ၊ ၿဖစ္ပါတယ္။ အဲဒီအခါ liquid level ဟာ၊ မူလရိွေနတဲ႔ set point level မွ၊ 'ကၽဆင္း'သြားပါတယ္။ fluid level ကၽဆင္းသြားၿခင္းအား၊ float သို႔မဟုတ္ level detector မွ၊ controller သို႔၊ input signal အၿဖစ္၊ ေပးပို႔လိုက္တဲ႔အခါ၊ controller output မွ၊ inlet valve ကို၊ 'ပို' ဖြင္႔ေပးၿပီး၊ inflow 'ၿမွင္႔တင္' ကာ၊ liquid ကိုေပးသြင္းလိုက္သလို၊ တနည္းအားၿဖင္႔ direct acting လည္း၊ ၿဖစ္ပါတယ္။
controller output မွ၊ inlet valve ရဲ႕ inflow နဲ႔၊ outlet valve ရဲ႕ outflow တို႔၊ 'ညီမၽွ' သြားတဲ႔သည္အထိ၊ 'ဖြင္႔' ေပးလိုက္တဲ႔အခါ၊ flow ညီမၽွသြားတဲ႔အတြက္၊ tank အတြင္းမွ fluid level လည္း၊ ေအာက္သို႔ ဆက္လက္ 'မ' ကၽဆင္းေတာ႔ပဲ၊ level တခုမွာ၊ maintain အေနနဲ႔၊ တည္ရိွေနမွာၿဖစ္ပါတယ္။ အသစ္ေပါါေပါက္လာတဲ႔ fluid level ဟာ၊ မူလ set level ရဲ႕ေအာက္မွာ၊ ရိွေနၿပီး၊ error အေနနဲ႔ ၿဖစ္ေပါါေနမွာလည္း၊ ၿဖစ္ပါတယ္။
proportional controller ေတြကို low cost application ေတြအတြက္၊ အသံုးၿပဳပါတယ္။ ဥပမာအေနနဲ႔၊ အမိွဳက္မီးရိွဳ႕စက္၊ incinerator တလံုးကို၊ ေဖာ္ၿပပါဦးမယ္။ အမိွဳက္မီးရိွဳ႕စက္ incinerator မွာ၊ မီးေလာင္ခန္း furnace အတြင္းသို႔၊ solenoid operated controlled valve တလံုး၊ အသံုးၿပဳၿပီး၊ ေလာင္စာ fuel ေပးသြင္းထားပါတယ္။
အမိွဳက္ wast ေတြ၊ မီးရိွဳ႕ရင္း၊ မီးေလာင္ခန္းရဲ႕ furnace temperature ဟာ၊ မူလ၊ သတ္မွတ္ ထားတဲ႔ set point ထက္၊ ေကၽာ္လြန္သြားတဲ႔အခါ၊ temperature sensor မွ၊ temperature controller သို႔၊ input signal ေပးသြင္းမွာ၊ ၿဖစ္ပါတယ္။ အဲဒီအခါ၊ controller ဟာ၊ reverse acting output အေနနဲ႔၊ solenoid မွတဆင္႔ valve ကို၊ fully shut 'ပိတ္' ေစၿပီး၊ fuel supply ၿဖတ္ေတာက္ကာ၊ process ကိုလည္း၊ 'ရပ္တန္႔' ထားလိုက္မွာၿဖစ္ပါတယ္။ incinerator ရဲ႕ process ၿပန္ 'စ' တဲ႔အခါမွာေတာ႔၊ controller ကို၊ manually reset လုပ္ေပးရန္၊ လိုအပ္ပါတယ္။

Fig. (9) - Effect of manual reset (Summary of control modes and response)
Fig. (9) မွာ Effect of manual reset ဆိုၿပီး၊ On/ Off, Proportional (P), Proportional plus Integral (P + I), Proportional plus Derivative (P + D) နဲ႔၊ Proportional plus Integral plus Derivative (P + I + D) အစရိွတဲ႔ control mode ေတြရဲ႕၊ system response ေတြကို၊ ေဖာ္ၿပထားပါတယ္။

Fig. (10) - Direct acting signal and Reverse acting signal
Fig. (10) မွာ Direct acting signal and Reverse acting signal ဆိုၿပီး၊ direct နဲ႔ reverse proportional acting ေတြကို၊ temperature controller ၿဖင္႔၊ ေဖာ္ၿပထားပါတယ္။ အလားတူ၊ valve actuator ၿဖင္႔လည္း၊ direct နဲ႔ reverse acting တို႔၊ အသံုးၿပဳကာ၊ အဖြင္႔ အပိတ္၊ ၿပဳလုပ္နိဳင္ပါတယ္။
"Integral control"
process plant ေတြမွာ၊ Proportional control အသံုးၿပဳတဲ႔အခါ၊ load ေၿပာင္းလဲတိုင္း၊ manual rest ၿပန္လည္၊ ၿပဳလုပ္ရသလို၊ manual rest ၿပဳလုပ္တိုင္း၊ operator ေတြအေနနဲ႔၊ set value, actual value နဲ႔၊ required value ေတြကို၊ ၿပန္လည္၊ ကိုးကားခၽိန္ညွိရပါတယ္။ ဒီ႔အတြက္၊ အလိုအေလၽွာက္ reset action ေဆာင္ရြက္ေပးရန္၊ လိုအပ္မယ္႔ applications ေတြမွာ၊ proportional controller အတြင္း၊ reset mechanism ေတြ၊ ထည္႔သြင္း၊ တတ္ဆင္ထားမယ္႔၊ integral control ကို၊ ေၿပာင္းလဲ၊ အသံုးၿပဳလာႀကပါတယ္။
integral control မွာ၊ control deviation integrated time ၿပီးဆံုးသြားတာနဲ႔၊ controller output မွတဆင္႔၊ offset ကို၊ ဖယ္ထုတ္မွာ၊ ၿဖစ္ပါတယ္။ controller output မွတဆင္႔၊ offset ကို ဖယ္ထုတ္ရန္၊ integral action time (IAT) ဆိုတဲ႔၊ အခၽိန္အတိုင္းအတာ တခုလည္း၊ လိုအပ္ပါတယ္။ တနည္းအားၿဖင္႔၊ proportional action ၿဖင္႔၊ ရရိွလာမယ္႔၊ output ကို၊ integral action ၿဖင္႔၊ controller output တခုအၿဖစ္၊ ေၿပာင္းလဲေစရန္၊ လိုအပ္မယ္႔၊ အခၽိန္အတိုင္းအတာဟာ၊ integral action time (IAT) လည္း၊ ၿဖစ္ ပါတယ္။
integral control ဟာ၊ controller မွတဆင္႔၊ error 'ကင္းစင္' သြားသည္အထိ၊ အရိွန္ 'တိုးၿမွင္႔' ကာ integral action ၿဖင္႔၊ ေဆာင္ရြက္ေပးပါတယ္။ error ကင္းစင္ရန္၊ ေဆာင္ရြက္ရာမွာ၊ အခၽိန္ ယူရသလို၊ integral control ဆိုတဲ႔၊ (P + I ) controller ေတြဟာ၊ process ရဲ႕ အၿမဲေၿပာင္းလဲေနတတ္တဲ႔၊ dynamic behavior အေပါါ၊ မူတည္ၿပီး၊ integral action time (IAT) ကို၊ လိုအပ္သလို၊ adjust အေနနဲ႔၊ ခၽိန္ညိွေပးနိဳင္တာကိုလည္း၊ ေတြ႔ရပါတယ္။
integral action time (IAT) တနည္းအားၿဖင္႔၊ integral action ရဲ႕ parameter ကို၊ repeat per minute ဆိုတဲ႔၊ အသံုးအနံွဳးနဲ႔၊ ေဖာ္ၿပေလ့ရိွၿပီး၊ တမိနစ္အတြင္း၊ ၿပဳလုပ္မယ္႔၊ integral action အႀကိမ္ အရည္အတြက္လည္း၊ ၿဖစ္ပါတယ္။ (P+I) controller ေတြမွာ၊ adjusted အေနနဲ႔၊ ခၽိန္ညိွနိဳင္မယ္႔၊ integral action time နဲ႔ ပက္သက္ၿပီး၊ Repeats per minutes = 1/ (IAT in minutes), IAT = Infinity - Means no integral action နဲ႔၊ IAT = 0 - Means infinite integral action အစရိွတဲ႔၊ အသံုးအနံွဳးေတြနဲ႔လည္း၊ ေဖာ္ၿပတတ္ပါတယ္။
integral action time (IAT) ခၽိန္ညိွတဲ႔အခါ၊ အခၽိန္အတိုင္းအတာ၊ ပမာဏ၊ 'တိုေတာင္း' လြန္းခဲ႔လၽွင္၊ process မွာ၊ over-reaction နဲ႔ instability အေၿခအေနေတြ၊ ၿဖစ္ေပါါ လာနိဳင္သလို၊ အကယ္၍၊ အခၽိန္အတိုင္းအတာ၊ ပမာဏ၊ 'ရွည္ႀကာ' လြန္းခဲ႔လၽွင္လည္း၊ plant မွာ၊ reset action အေနနဲ႔၊ ေနွးေကြးစြာ၊ တုန္႔ၿပန္ေဆာင္ရြက္တာ၊ ေတြ႔ရပါတယ္။
(P+I) controllers ေတြမွာ၊ ရုတ္တရက္ load ေၿပာင္းလဲစဥ္၊ time lag ဆိုတဲ႔၊ အခၽိန္ အတိုင္းအတာ၊ တခုအတြင္း၊ over shoot အေၿခအေန၊ ၿဖစ္ေပါါတတ္ပါတယ္။ ဥပမာအေနနဲ႔၊ set point 80° C အတြက္၊ P-band ကို၊ 5° C (±2.5° C) ၿဖင္႔၊ ခၽိန္ညွိထားမယ္႔၊ process မွာ၊ ရုတ္တရက္ load ေၿပာင္းလဲၿခင္းေႀကာင္႔၊ temperature ဟာ၊ 60° C အထိ၊ ကၽဆင္းသြားၿခင္းကို၊ time lag ဆိုတဲ႔၊ အခၽိန္အတိုင္းအတာ၊ တခုအတြင္း၊ over shoot အေၿခအေန၊ ေပါါေပါက္လာၿခင္း အၿဖစ္၊ သတ္မွတ္နိဳင္ပါတယ္။

Fig. (11) - P+I Function after a step change in load
integration process ရဲ႕ မူလသဘာဝအရ၊ integral control action ဟာ၊ proportional control action ရဲ႕ေနာက္မွ၊ response အေနနဲ႔၊ တုန္႔ၿပန္ ေဆာင္ရြက္တဲ႔အတြက္၊ lag အၿဖစ္၊ 'ေနာက္ကၽန္' ေနၿခင္းၿဖစ္ပါတယ္။ time lag ဆိုတဲ႔ ေနာက္ကၽန္ရစ္ေနမယ္႔၊ အခၽိန္အတြင္း၊ control response ရဲ႕၊ actual value မွာ၊ out of control condition ေပါါေပါက္လာနိဳင္ၿပီး၊ process မွာလည္း oscillation ေတြ၊ ၿဖစ္ေပါါတတ္ပါတယ္။ ဥပမာအၿဖစ္ Fig. (11) မွာ၊ P+I Function after a step change in load ဆိုၿပီး၊ oscillation ၿဖစ္ေပါါမွဳကို၊ ေဖာ္ၿပထားပါတယ္။
integral action ၿဖင္႔၊ ေဆာင္ရြက္မယ္႔ controller gain ရဲ႕၊ တန္ဘိုးအေပါါ၊ မူတည္ၿပီး၊ process မွာ၊ oscillation အတက္အကၽ၊ အနည္းအမၽား၊ ၿဖစ္ေပါါေပါါတတ္တယ္။ oscillation 'ေလၽွာ႔ခၽ' နိဳင္ရန္၊ gain တန္ဘိုးလည္း၊ 'ေသးငယ္' သင္႔ပါတယ္။ တခါတရံ plant ကို၊ shut down ၿပဳလုပ္ၿပီး၊ ၿပန္လည္ေမာင္းနွင္စဥ္၊ သို႔မဟုတ္၊ load set up change ၿပဳလုပ္စဥ္၊ အစရိွတဲ႔၊ အေၿခအေနေတြမွာ၊ error ပမာဏ ႀကီးမားစြာ၊ ေပါါေပါက္လာတတ္တဲ႔အတြက္၊ control response period ပိုမို၊ လိုအပ္လာမွာ၊ ၿဖစ္ပါတယ္။ တနည္းအားၿဖင္႔၊ system recover အေၿခအေန၊ ၿပန္လည္၊ ရရိွေစရန္၊ over shoot သို႔မဟုတ္၊ under shoot ေတြ၊ ကင္းစင္သြားေစရန္၊ အခၽိန္ 'ပို' ကာ၊ ယူရတယ္လို႔၊ ဆိုနိဳင္ပါတယ္။
"Derivative control"
(P+I) controller ေတြမွာ၊ system equilibrium အၿမန္ဆံုး၊ ၿပန္လည္ရရိွေစရန္၊ integral wind-up အၿဖစ္၊ rate action ထည္႔သြင္း၊ လာႀကပါတယ္။ load ေၿပာင္းလဲတိုင္း၊ ေပါါေပါက္လာမယ္႔၊ 'over shoot' ေတြကိုု၊ rate action ၿဖင္႔၊ ေလၽွာ႔ခၽေပးရန္၊ တနည္းအားၿဖင္႔၊ load အလၽွင္အၿမန္ ေၿပာင္းလဲစဥ္၊ set point မွ၊ 'လြဲ' ကာၿဖစ္ေပါါလာတဲ႔၊ deviation ေတြ၊ ေလၽွာ႔ခၽရန္၊ derivative action လို႔ေခါါတဲ႔၊ 'D action' ထည္႔သြင္း အသံုးၿပဳၿခင္း၊ ၿဖစ္သလို၊ (P+I+D) controller လို႔၊ ေခါါႀကပါတယ္။

process ရဲ႕၊ stable condition အတြင္း၊ derivative action 'မ' ၿဖစ္ေပါါသလို၊ အကယ္၍၊ derivative action ၿဖစ္ေပါါမွဳ၊ အႀကိမ္အရည္အတြက္၊ 'မၽား' လြန္းလၽွင္လည္း၊ malfunctioning အေနနဲ႔၊ system မွာ၊ ၿပသနာေတြ၊ ေပါါေပါက္တတ္ပါတယ္။ ဒီ႔အတြက္ (P+I+D) controller မွ၊ derivative adjustment ရဲ႕၊ gain ပမာဏဟာ၊ 'ႀကီးမား' သင္႔ပါတယ္။
(P+I+D) controller မွ၊ derivative action ရဲ႕ parameter ကို၊ 'TD' ဆိုတဲ႔၊ အသံုးအနံွဳးၿဖင္႔၊ ေဖာ္ၿပေလ့ရိွၿပီး၊ လိုအပ္သလို၊ ခၽိန္ညိွေပးနိဳင္ပါတယ္။ ဒါ႔အၿပင္၊ derivative action ကို၊ TD = 0 - Means no D action နဲ႔၊ TD = Infinity - Means infinite D action အစရိွတဲ႔၊ အသံုးအနံွဳးေတြ နဲ႔လည္း၊ ေဖာ္ၿပတတ္ပါတယ္။
မၽားေသာအားၿဖင္႔၊ 'temperature control loops' ေတြဟာ၊ smooth measurements နဲ႔၊ long time constant အေၿခအေနမွာ၊ ရိွေပမယ္႔၊ တခါတရံ process variable အေနနဲ႔၊ recover ၿဖစ္ရန္၊ အခၽိန္ 'ႀကာ' တတ္တဲ႔အတြက္၊ derivative control အသံုးၿပဳရန္၊ လိုအပ္ပါတယ္။
အလားတူ၊ smooth measurements အေၿခအေနမွာရိွတဲ႔၊ 'level control loops' ေတြမွာလည္း၊ boiling liquids နဲ႔၊ gas separation processes ေတြေႀကာင္႔၊ oscillation ဆိုတဲ႔ noises ေတြ၊ အၿမဲၿဖစ္ေပါါေလ့၊ ရိွတဲ႔အတြက္၊ derivative control အသံုးၿပဳႀကပါတယ္။
'flow control loops' ေတြမွာေတာ႔၊ noise ဟာ၊ တိုေတာင္းတဲ႔၊ short time constants အေနနဲ႔သာ၊ ၿဖစ္ေပါါတဲ႔အတြက္၊ derivative control အသံုးၿပဳရန္၊ မလိုအပ္တာ၊ ေတြ႔ရပါတယ္။ 'flow control loops' ရဲ႕ တိုေတာင္းတဲ႔၊ short time constants အေၿခအေနမွာ၊ noise ကို၊ proportional control မွ၊ error အၿဖစ္၊ ရယူၿပီး၊ integral control မွာ၊ ခၽက္ၿခင္း၊ reset ၿပဳလုပ္ေပးနိဳင္တဲ႔အတြက္၊ derivative control မလိုအပ္တာလည္း၊ ၿဖစ္ပါတယ္။
ဒါ႔အၿပင္ 'liquid pressure control loops' ေတြဟာ၊ flow control loops ေတြကဲ႔သို႔၊ short time constants အေနနဲ႔သာ၊ noise ၿဖစ္ေပါါတဲ႔အတြက္၊ derivative control ထည္႔သြင္းအသံုးၿပဳရန္၊ မလိုအပ္တာကိုလည္း၊ ေတြ႔ရပါတယ္။ ဒါေပမယ္႔ gas pressure control loops ေတြကေတာ႔၊ temperature loops ေတြနဲ႔၊ level control loops ေတြကဲ႔သို႔၊ integral processes အတြင္း၊ noise အၿမဲ၊ ၿဖစ္ေပါါတတ္တဲ႔အတြက္၊ derivative control အသံုးၿပဳႀကပါတယ္။
Summary notes
(i) - Proportional control ဟာ၊ linear feedback control system ၿဖစ္ပါတယ္။ (ii) - Proportional control မွာ၊ လိုအပ္တဲ႔၊ တန္ဘိုး desired value (set point, SP) နဲ႔၊ measured value (process value, PV) အႀကားမွ၊ 'ကြာၿခားခၽက္' error ကို၊ feedback အၿဖစ္၊ အသံုးၿပဳထားပါတယ္။ (iii) - process မွာ၊ Proportional control အသံုးၿပဳတဲ႔အခါ၊ load ေၿပာင္းလဲတိုင္း၊ manual reset ၿပဳလုပ္ေပးရန္၊ လိုအပ္ပါတယ္။
(iv) - Integral control ဟာ၊ load ေၿပာင္းလဲတိုင္း၊ reset action ကို၊ electronic integration routine သို႔မဟုတ္၊ pneumatic integration routine တခုခုမွ၊ အလိုအေလၽွာက္၊ ေဆာင္ရြက္ေပးမယ္႔၊ control system ၿဖစ္ပါတယ္။ (v) - Integral control မွာ၊ လိုအပ္တဲ႔၊ တန္ဘိုး desired value (set point, SP) နဲ႔၊ measured value (process value, PV) အႀကားမွ၊ 'အခၽိဳး' offest တနည္းအားၿဖင္႔၊ 'ကြာၿခားခၽက္' error ကို၊ ဖယ္ထုတ္ပါတယ္။ (v) - process မွ၊ error ကို၊ ဖယ္ထုတ္စဥ္၊ integral action time အၿဖစ္၊ အခၽိန္အတိုင္းအတာ၊ တခုယူပါတယ္။
(vi) - process မွာ၊ Integral control အသံုးၿပဳတဲ႔အခါ၊ load ေၿပာင္းလဲတိုင္း၊ over shoot,
under shoot ေတြနဲ႔၊ oscillation ေတြ၊ ေပါါေပါက္နိဳင္ပါတယ္။ (vii) - Derivative control ဟာ၊ load ေၿပာင္းလဲတိုင္း၊ ေပါါေပါက္လာမယ္႔၊ over shoot, under shoot ေတြနဲ႔၊ oscillation ေတြကို၊ integral wind-up အၿဖစ္၊ ေလၽွာ႔ခၽေပးပါတယ္။
(viii) - temperature control loops, level control loops နဲ႔၊ gas pressure control loops ေတြမွာ၊ load ေၿပာင္းလဲတိုင္း၊ oscillation ေတြ၊ ေပါါေပါက္တဲ႔အတြက္၊ derivative control ထည္႔သြင္းထားတဲ႔၊ (P + I + D) controllers ေတြ၊ အသံုးၿပဳပါတယ္။
(ix) - flow control loops နဲ႔၊ liquid pressure control loop ေတြမွာ၊ oscillations ေတြကို၊ proportional control မွ၊ error အၿဖစ္၊ ရယူၿပီး၊ integral control မွာ၊ ခၽက္ၿခင္း၊ reset ၿပဳလုပ္ေပးနိဳင္တဲ႔အတြက္၊ (P + I) controllers ေတြ၊ အသံုးၿပဳပါတယ္။
(x) - continuous control မွာ၊ (P+I+D) controller ေတြ၊ အသံုးၿပဳတဲ႔အခါ၊ Proportional control (P) ဟာ၊ adjustable gain အသံုးၿပဳၿပီး၊ stability ရရိွရန္၊ ေဆာင္ရြက္ေပးပါတယ္။
(xi) - Integral control (I) ကေတာ႔၊ load ေၿပာင္းလဲတိုင္း၊ ေပါါေပါက္လာမယ္႔၊ offset ကို၊ ေလၽွာ႔ခၽေပးပါတယ္။
(xii) - Derivative control (D) ကလည္း၊ rapid load changes ေတြမွာ၊ ေၿပာင္းလဲ၊ ေသြဖီသြားမယ္႔ movement ကို၊ ၿမန္ၿမန္ဆန္ဆန္ speed up အေနနဲ႔၊ set point သို႔၊ ၿပန္လည္ေရာက္ရိွေစပါတယ္။



Comments