"သေဘ္ာ က VFD ဆိုတဲ႔ Variable frequency drive (၁)"
Reference, thanks and image credit to : (1) Bartos, Frank J. (Sep. 1, 2004). "AC Drives Stay Vital for the 21st Century". Control Engineering (Reed Business Information)., (2) Cleaveland, Peter (Nov. 1, 2007). "AC Adjustable Speed Drives". Control Engineering (Reed Business Information)., (3) "Power Electronics and Motor Drives" : Advances and Trends. Amsterdam: Academic. ISBN 978-0-12-088405-6., Bartos, Frank J. (Sep. 1, 2004). (4) "AC Drives Stay Vital for the 21st Century". Control Engineering (Reed Business Information)., Eisenbrown, Robert E. (May 18, 2008). (5) "AC Drives, Historical and Future Perspective of Innovation and Growth". Keynote Presentation for the 25th Anniversary of The Wisconsin Electric Machines and Power Electronics Consortium (WEMPEC). University of Wisconsin, Madison, WI, USA.
Remark : All references and images herein this page are for use of educational purpose only. The owner of this page is not responsible for the consequences in case of violation to copyright, trademark, patent, criminal trust of breach or other intellectual property rights of any third party.
'VFD' ဆိုတဲ႔ 'variable frequency drive' ကို၊ adjustable frequency drive, variable speed drive, AC drive, micro drive နဲ႔ inverter ရယ္လို႔လည္း၊ ေခါါႀကၿပီး၊ electric motor ရဲ႕ လည္ပတ္နံွဳး speed ကို လိုအပ္သလို၊ ေၿပာင္းလဲေစရန္ ေဆာင္ရြက္ေပးပါတယ္။ တနည္းအားၿဖင္႔ VFD ဟာ၊ ‘electro-mechanical drive system’ ၿဖစ္ၿပီး၊ input frequency နဲ႔ voltage ေတြ၊ ေၿပာင္းလဲ ေပးသြင္းၿခင္းၿဖင္႔၊ electric motor ရဲ႕၊ speed နဲ႔ torque ကို၊ လိုအပ္သလို၊ ခၽိန္ညိွေပးၿခင္းၿဖစ္တယ္လို႔၊ ဆိုနိဳင္ပါတယ္။

VFD ေတြကို၊ အရြယ္အစားေသးငယ္တဲ႔၊ small appliances ေတြမွ၊ အရြယ္အစား ႀကီးမားတဲ႔၊ သတၱဳတူးေဖာ္ေရးလုပ္ငန္းသံုး၊ mine mill applications ေတြအထိ၊ တတ္ဆင္ အသံုးၿပဳႀကပါတယ္။ Fig. (1) မွာ၊ အရြယ္အစား၊ ေသးငယ္တဲ႔၊ VFD တခုကို၊ 'Small variable frequency drive' ဆိုၿပီး၊ ဥပမာအၿဖစ္၊ ေဖာ္ၿပထားပါတယ္။
ပံုေသလည္ပတ္နံွဳး fixed speed ၿဖင္႔၊ ေမာင္းနွင္ေနတဲ႔ electric motor ေတြရဲ႕၊ load applications ေတြမွာ၊ retrofitted installation အေနနဲ႔၊ VFDs ေတြ၊ အစားထိုး အသံုးၿပဳၿခင္းၿဖင္႔၊ စြမ္းအင္ ၿမင္႔တက္လာမွဳဆိုတဲ႔၊ energy efficiency improvement ရရိွလာနိဳင္တာ၊ ေတြ႔ရပါတယ္။ Fig. (2) မွာ၊ 'VFD system' ဆိုၿပီး၊ ဥပမာအၿဖစ္၊ ေဖာ္ၿပထားပါတယ္။
Fig. (1) - Small variable frequency drive
VFD ေတြကို၊ အရြယ္အစားေသးငယ္တဲ႔၊ small appliances ေတြမွ၊ အရြယ္အစား ႀကီးမားတဲ႔၊ သတၱဳတူးေဖာ္ေရးလုပ္ငန္းသံုး၊ mine mill applications ေတြအထိ၊ တတ္ဆင္ အသံုးၿပဳႀကပါတယ္။ Fig. (1) မွာ၊ အရြယ္အစား၊ ေသးငယ္တဲ႔၊ VFD တခုကို၊ 'Small variable frequency drive' ဆိုၿပီး၊ ဥပမာအၿဖစ္၊ ေဖာ္ၿပထားပါတယ္။
ပံုေသလည္ပတ္နံွဳး fixed speed ၿဖင္႔၊ ေမာင္းနွင္ေနတဲ႔ electric motor ေတြရဲ႕၊ load applications ေတြမွာ၊ retrofitted installation အေနနဲ႔၊ VFDs ေတြ၊ အစားထိုး အသံုးၿပဳၿခင္းၿဖင္႔၊ စြမ္းအင္ ၿမင္႔တက္လာမွဳဆိုတဲ႔၊ energy efficiency improvement ရရိွလာနိဳင္တာ၊ ေတြ႔ရပါတယ္။ Fig. (2) မွာ၊ 'VFD system' ဆိုၿပီး၊ ဥပမာအၿဖစ္၊ ေဖာ္ၿပထားပါတယ္။
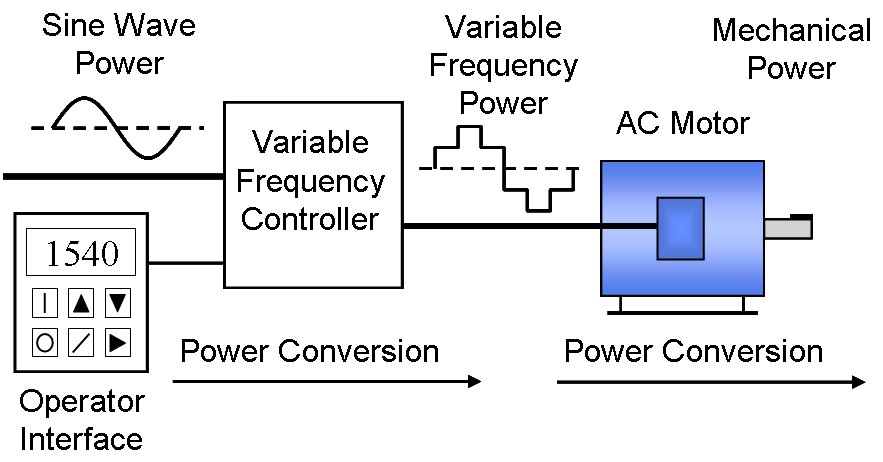
Fig. (2) - VFD system
VFD ေတြကို၊ အသံုးၿပဳမယ္႔၊ applications အေပါါ မူတည္ၿပီး၊ low and medium voltage ပမာဏ အမၽိဳးမၽိဳးရိွတဲ႔၊ AC - AC နဲ႔ DC - AC inverters ေတြအၿဖစ္၊ ထုတ္လုပ္ထားႀကပါတယ္။ VFD မွာ၊ AC motor, main drive controller assembly နဲ႔၊ drive operator interface ဆိုတဲ႔၊ main sub-systems (၃) ခု၊ အသံုးၿပဳထားပါတယ္။ ေယဘုယၽအေနနဲ႔၊ ‘AC three - phase induction motor’ ေတြၿဖင္႔၊ တြဲဖက္အသံုးၿပဳသလို၊ ‘single - phase motor’ အခၽိဳ႕နဲ႔လည္း၊ တြဲဖက္ အသံုးၿပဳနိဳင္ပါတယ္။

Fig. (3) - Chassis of VFD (cover removed)
‘variable frequency drive controller’ ေတြကို၊ ‘solid state power electronics conversion system’ ၿဖင္႔၊ တည္ေဆာက္ထားၿပီး၊ rectifier bridge converter, direct current (DC) link နဲ႔၊ inverter တို႔ ပါဝင္ပါတယ္။ Fig. (3) မွာ၊ 'Chassis of VFD (cover removed)' ဆိုၿပီး၊ ဥပမာအၿဖစ္၊ ေဖာ္ၿပထားပါတယ္။ VFD အမၽိဳးအစား၊ ေၿမာက္မၽားစြာထဲမွ၊ drive controller အမၽားစုဟာ၊ ‘AC - AC drive’ ေတြၿဖစ္ႀကၿပီး၊ ေပးသြင္းလိုက္တဲ႔ AC line input ကို၊ AC inverter output အၿဖစ္၊ ၿပန္လည္ ထုတ္ေပးပါတယ္။ common DC bus နဲ႔၊ solar applications ေတြမွာေတာ႔၊ ‘DC - AC drive controller’ ေတြ၊ အသံုးၿပဳႀကပါတယ္။
‘VSI’ ဆိုတဲ႔ voltage-source inverter drive ဟာ၊ အသံုးမၽားတဲ႔ drive controller တခု ၿဖစ္ပါတယ္။ VSI drive မွာ အသံုးၿပဳထားတဲ႔၊ rectifier converter ဟာ၊ ‘three phase, six pulse, full wave diode bridge’ အမၽိဳးအစား၊ rectifier ၿဖစ္ပါတယ္။ VSI drive controller ေတြကို၊ single - phase converter မွ၊ input ေပးသြင္းၿပီး၊ three - phase inverter output ၿပန္လည္၊ ထုတ္ယူနိဳင္တဲ႔အတြက္၊ ‘phase converter’ အၿဖစ္၊ သတ္မွတ္နိဳင္ပါတယ္။
VSI drive ရဲ႕ ‘DC link’ မွာ capacitor ပါဝင္ၿပီး၊ rectifier converter မွ၊ DC output ripple ေတြကို၊ စစ္ယူဖယ္ရွားကာ၊ ‘stiff input’ အၿဖစ္၊ ေၿပာင္းလဲၿပီးမွ၊ three - phase inverter သို႔ ေပးသြင္းပါတယ္။ တနည္းအားၿဖင္႔ inverter ရဲ႕၊ active switching elements ေတြအတြက္၊ quasi - sinusoidal three phase AC voltage output ရရိွလာေစရန္၊ filtered DC voltage အၿဖစ္၊ ေၿပာင္းလဲေပးသြင္းၿခင္းလည္း၊ ၿဖစ္ပါတယ္။
‘VSI’ ဆိုတဲ႔ voltage -source inverter drives ေတြကို၊ ‘CSI’ ဆိုတဲ႔ phase-controlled current-source inverter drives ေတြ အပါအဝင္ ‘LCI’ ဆိုတဲ႔၊ load-commutated inverter ေတြနဲ႔၊ နိွဳင္းယွဥ္ႀကည္႔တဲ႔အခါ၊ ၿမင္႔မားတဲ႔ higher power factor ရရိွနိဳင္တာ ေတြ႔ရသလို၊ harmonic distortion အနည္းငယ္သာ၊ ေပါါေပါက္နိဳင္တာကိုလည္း၊ ေတြ႔ရပါတယ္။
'variable - torque applications' ေတြအတြက္၊ ‘Volts per Hertz (V/ Hz) drive control system’ အသံုးၿပဳႀကပါတယ္။ (V/ Hz) drive control system အသံုးၿပဳတဲ႔အခါ AC motor ေတြရဲ႕ characteristics အရ၊ motor သို႔ ေပးသြင္းမယ္႔ inverter output မွ၊ voltage magnitude ဟာ၊ required load torque နဲ႔၊ linear V/ Hz relationship အၿဖစ္၊ ကိုက္ညီရန္၊ လိုအပ္ပါတယ္။ ဥပမာ၊ 460 volt, 60 Hz motors ရဲ႕၊ linear V/ Hz relationship ဟာ၊ 460/ 60 = 7. 67 V/ Hz ရိွတဲ႔အတြက္၊ voltage magnitude အေနနဲ႔ ၊ 7. 67 V/ Hz ပမာဏ၊ ေပးသြင္းရမွာၿဖစ္ပါတယ္။
low speed or demanding, dynamic speed regulation, positioning နဲ႔ reversing load requirements အစရိွတဲ႔၊ high performance applications ေတြအတြက္၊ (V/ Hz) drive control system အသံုးၿပဳရန္ သင္႔ေလၽွာ္ပါတယ္။ အခၽိဳ႕ (V/ Hz) drive control system ေတြကို၊ quadratic (V/ Hz) mode အေနနဲ႔၊ အသံုးၿပဳနိဳင္သလို၊ programmed ထည္႔သြင္းကာ၊ multi-point (V/ Hz) paths ေတြအၿဖစ္လည္း၊ အသံုးၿပဳနိဳင္ပါတယ္။
အၿခား drive control system ေတြၿဖစ္တဲ႔၊ vector control system နဲ႔ DTC ဆိုတဲ႔၊ direct torque control system တို႔ဟာလည္း၊ motor သို႔ ေပးသြင္းမယ္႔ voltage magnitude ကို၊ ခၽိန္ညိွေပးၿခင္းၿဖင္႔၊ motor ရဲ႕ magnetic flux နဲ႔၊ mechanical torque ေတြကို၊ ေၿပာင္းလဲေပးနိဳင္ပါတယ္။

Fig. (4) - space vector pulse - width modulation 'SVPWM'
ေနာက္ပိုင္းမွာေတာ႔ 'SVPWM' ဆိုတဲ႔၊ space vector pulse - width modulation method ကို၊ drive control system အေနနဲ႔၊ အသံုးၿပဳလာႀကပါတယ္။ Fig. (4) မွာ၊ 'SVPWM' ကို၊ ဥပမာအၿဖစ္၊ ေဖာ္ၿပထားပါတယ္။ sinusoidal PWM လို႔ေခါါတဲ႔၊ space vector pulse - width modulation method ဟာ၊ motor သို႔ ေပးသြင္းမယ္႔ voltage (or current) သို႔မဟုတ္၊ frequency ကို၊ vary drives အၿဖစ္၊ ေၿပာင္းလဲေပးမယ္႔ drive control system လည္း၊ ၿဖစ္ပါတယ္။
တနည္းအားၿဖင္႔၊ မူလက motor သို႔ ေပးသြင္းမယ္႔ voltage (or current) ရဲ႕ operating frequency ကို၊ saw-toothed carrier frequency အတြင္းမွ၊ ၿဖတ္သန္းသြားမယ္႔၊ modulating sinusoidal signal အသံုးၿပဳၿပီး၊ quasi - sinusoidal ဆိုတဲ႔၊ variable-pulse width output အၿဖစ္၊ ေၿပာင္းယူကာ၊ motor သို႔၊ ၿပန္လည္၊ ေပးသြင္းၿခင္းလည္း၊ ၿဖစ္ပါတယ္။
sinusoidal PWM အသံုးၿပဳတဲ႔အခါ၊ induction motor ေတြရဲ႕ nameplate မွာ၊ ေရးသားေဖာ္ၿပထားတဲ႔ rated speed ထက္ ပိုၿပီး၊ ေမာင္းနွင္နိဳင္ေပမယ္႔၊ ေရးသား ေဖာ္ၿပထားတဲ႔၊ voltage ထက္ အနည္းငယ္ ပိုၿပီး၊ ေပးသြင္းလိုက္တဲ႔အခါမွာေတာ႔၊ "field weakening" အေၿခအေနေတြ၊ ေပါါေပါက္လာတတ္ပါတယ္။ တနည္းအားၿဖင္႔ AC motorsေတြကို၊ sinusoidal PWM အသံုးၿပဳတဲ႔အခါ၊ rated V/ Hz ပမာဏရဲ႕ ေအာက္မွာ ေမာင္းနွင္မွသာ၊ 100% power ရရိွနိဳင္တယ္လို႔ ဆိုနိဳင္ပါတယ္။
VFD controllers ေတြရဲ႕၊ overall operation တခုလံုးကို၊ programmed ေရးသြင္းထားတဲ႔၊ embedded microprocessor ေတြမွ၊ ေဆာင္ရြက္ေပးပါတယ္။ microprocessor ေတြကို၊ 'user inaccessible firmware' ဆိုတဲ႔၊ အသံုးၿပဳသူအေနနဲ႔ ၿပဳၿပင္ေၿပာင္းလဲလို႔ မရေစရန္၊ ေဆာင္ရြက္ထားပါတယ္။ control, protect, monitor, motor နဲ႔၊ driven equipment ေတြကိုေတာ႔၊ display, variable နဲ႔၊ function block parameters အၿဖစ္၊ အသံုးၿပဳသူမွ user programming သံုးၿပီး၊ ၿပဳၿပင္ ေၿပာင္းလဲနိဳင္ပါတယ္။
rectifier converter ရဲ႕ upstream အဝင္ဖက္မွာ၊ circuit breaker သို႔မဟုတ္ fuses ေတြ၊ isolation contactor, EMC filter, line reactor နဲ႔၊ passive filter တို႔၊ တတ္ဆင္ထားပါတယ္။ DC link ကို braking chopper နဲ႔၊ braking resistor တို႔ၿဖင္႔ ဆက္သြယ္ထားၿပီး၊ inverter ရဲ႕ downstream အထြက္မွာေတာ႔၊ output reactor, sine wave filter နဲ႔ dV/ dt filter တို႔ၿဖင္႔ ဆက္သြယ္ထားပါတယ္။ သံုးစြဲသူ operator အေနနဲ႔၊ ေမာင္းနွင္ ရပ္တန္႔ၿခင္း start and stop နဲ႔၊ လိုအပ္သလို operating speed ခၽိန္ညိွၿခင္းေတြကို၊ 'operator interface' မွတဆင္႔၊ ေဆာင္ရြက္နိဳင္ပါတယ္။ operator interface ဆိုတဲ႔၊ operator control functions ေတြမွာ၊ reversing နဲ႔ manual speed adjustment အေနအထားမွ၊ external process control signal ရယူၿပီး၊ automatic control အၿဖစ္၊ ေၿပာင္းလဲ အသံုးၿပဳၿခင္းတို႔လည္း ပါဝင္ပါတယ္။
drive ရဲ႕ operation information ေတြကို operator interface မွ အကၡရာနဲ႔ ကိန္းဂဏန္းေတြ ကိုယ္စားၿပဳ alphanumeric display အၿဖစ္၊ ေဖာ္ၿပသလို indication lights ေတြနဲ႔ meters ေတြ အသံုးၿပဳၿပီးေတာ႔လည္း ေဖာ္ၿပနိဳင္ပါတယ္။ keypad display ကို၊ alphanumeric display နဲ႔ အတူ၊ VFD module ရဲ႕ ကိုယ္ထည္မွ၊ front dead cover မွာ တြဲဖက္၊ တတ္ဆင္ထားတတ္သလို၊ cable-connected အေနနဲ႔၊ VFD controller ရဲ႕ မနီးမေဝး၊ short distance အကြာအေဝးမွာလည္း၊ တတ္ဆင္ထားတတ္ပါတယ္။
အခၽိဳ႕ VFD controller ေတြမွာ၊ connecting push buttons ေတြအတြက္၊ input နဲ႔၊ output (I/ O) terminals ေတြ၊ switches ေတြ၊ operator interface devices ေတြအပါအဝင္၊ control signals ေတြအတြက္၊ terminals ေတြကိုလည္း၊ ထည္႔သြင္း တတ္ဆင္ထားပါတယ္။ ဒါ႔အၿပင္ computer နဲ႔ တြဲဖက္ၿပီး၊ configured, adjusted, monitored နဲ႔၊ controlled တို႔ ေဆာင္ရြက္နိဳင္ေစရန္၊ serial communications port ေတြ၊ ထည္႔သြင္း တတ္ဆင္ထားေလ့ ရိွပါတယ္။
ကိုႀသဒိနိတ္ဂဲႀသေမႀတီနဲ႔၊ ႀတီဂိုနိဳေမႀတီ၊ သခၽ္ာအယူအဆေတြအရ၊ motors ေတြရဲ႕၊ လည္ပတ္၊ အသံုးၿပဳမယ္႔ applications ေတြကို၊ (a) single-quadrant, (b) two-quadrant, (c) three quadrant နဲ႔၊ (d) four-quadrant ဆိုၿပီး၊ categorized အေနနဲ႔၊ ခြဲၿခားနိဳင္ပါတယ္။ ဒီ႔အတြက္၊ load operation အေနနဲ႔၊ VFDs ေတြ အသံုးၿပဳရာမွာ၊ applications ေတြအၿဖစ္၊ (i) Quadrant I, (ii) Quadrant II, (iii) Quadrant III နဲ႔၊ (iv) Quadrant IV ဆိုကာ၊ သတ္မွတ္ႀကပါတယ္။ Fig. (5) မွာ၊ 'Quadrants' ေတြကို၊ ဥပမာအၿဖစ္၊ ေဖာ္ၿပထားပါတယ္။

Fig. (5) - Quadrants
(i) - 'Quadrant I' ဟာ၊ driving နဲ႔ motoring တို႔ကို၊ ေဆာင္ရြက္ေပးပါတယ္။ forward accelerating quadrant လို႔ေခါါၿပီး၊ positive speed ၿဖင္႔ torque ရရိွေစၿခင္းလည္း ၿဖစ္ပါတယ္။ (ii) - 'Quadrant II' ကေတာ႔၊ generating နဲ႔ braking တို႔ကို၊ ေဆာင္ရြက္ေပးပါတယ္။ forward braking-decelerating quadrant လို႔ေခါါၿပီး၊ positive speed နဲ႔ negative torque ရရိွေစပါတယ္။
(iii) - 'Quadrant III' ဟာလည္း၊ driving နဲ႔ motoring တို႔ကို၊ ေဆာင္ရြက္ေပးပါတယ္။ reverse accelerating quadrant လို႔ေခါါၿပီး၊ negative speed နဲ႔ torque ရရိွေစၿခင္းလည္း ၿဖစ္ပါတယ္။ (iv) - 'Quadrant IV' ဟာ generating နဲ႔ breaking တို႔ကို၊ ေဆာင္ရြက္ေပးပါတယ္။ reverse braking - decelerating quadrant လို႔ေခါါၿပီး၊ negative speed နဲ႔ positive torque တို႔၊ ရရိွေစပါတယ္။
motor applications အမၽားစုဟာ၊ single - quadrant loads operating ေခါါ၊ forward accelerating quadrant ေတြ ၿဖစ္တဲ႔အတြက္၊ positive speed ၿဖင္႔ torque ရရိွေစမယ္႔၊ Quadrant I ကို ပိုမိုအသံုးၿပဳႀကပါတယ္။ variable - torque ပိုမို လိုအပ္မယ္႔၊ centrifugal pumps ေတြ၊ blower fans ေတြနဲ႔၊ certain constant - torque လိုအပ္တဲ႔၊ extruders loads ေတြအတြက္၊ Quadrant I ဟာ အသင္႔ေလၽွာ္ဆံုးၿဖစ္ပါတယ္။
အခၽိဳ႕ motor applications ေတြမွာေတာ႔၊ two - quadrant loads operating အၿဖစ္၊ ေမာင္းနွင္ရတဲ႔အတြက္၊ Quadrant I နဲ႔ Quadrant II တို႔ကို၊ အသံုးၿပဳႀကပါတယ္။ two - quadrant loads ေတြဟာ၊ positive speed load ေတြၿဖစ္ၿပီး၊ decelerating အေနနဲ႔ speed ေၿပာင္းလဲစဥ္၊ ေပါါေပါက္လာမယ္႔၊ natural mechanical losses ေတြထက္၊ ပိုမို လၽွင္ၿမန္စြာ speed ေၿပာင္းလဲေပးရန္၊ တနည္းအားၿဖင္႔ natural mechanical losses ေတြ၊ မေပါါေပါက္ခင္ speed ေၿပာင္းလဲေစရန္၊ (polarity ေၿပာင္းလဲၿခင္းၿဖင္႔၊ torque ေၿပာင္းလဲေပးမယ္႔) applications ေတြအၿဖစ္၊ သတ္မွတ္နိဳင္ပါတယ္။ အထူးသၿဖင္႔ blower fan ေတြမွာ၊ two - quadrant loads operating အသံုးၿပဳထားတာ၊ ေတြ႔ရပါတယ္။
positive သို႔မဟုတ္ negative polarity တနည္းအားၿဖင္႔ motor ရဲ႕ လည္ပတ္မွဳလားရာ direction (၂) ဖက္စလံုးမွာ၊ speed နဲ႔ torque တို႔ တူညီရန္လိုအပ္မယ္႔၊ applications ေတြမွာေတာ႔၊ Quadrants I နဲ႔ Quadrants III တို႔၊ ေပါင္းစပ္ထားတဲ႔ three - quadrant drives ေတြ၊ အသံုးၿပဳႀကပါတယ္။
သေဘ္ာမွ bow thruster ေတြ၊ cargo pumps ေတြ၊ hoist ေတြ၊ စက္ေလွကား elevators ေတြနဲ႔၊ hilly conveyors ေတြအၿပင္၊ အေအးခန္း regeneration system ေတြ၊ အစရိွတဲ႔ high performance applications ေတြမွေတာ႔၊ four-quadrant loads လို႔ေခါါတဲ႔၊ Quadrants I နဲ႔ IV တို႔ကို၊ အသံုးၿပဳႀကပါတယ္။
"Starting sequence" - direct on line starting မွာ၊ motor စတင္လည္ပတ္စဥ္၊ ေပါါေပါက္လာမယ္႔၊ ၿမင္႔မားတဲ႔ high inrush current ၿဖစ္ေပါါမွဳကို၊ ေရွာင္လြဲရန္ VFD မွတဆင္႔ low frequency နဲ႔၊ voltage ကို ကနဦး initially အၿဖစ္ ေပးသြင္းပါတယ္။ motor လည္ပတ္သြားတဲ႔အခါ၊ starting sequence အေနနဲ႔၊ VFD မွ frequency နဲ႔ voltage တိုးၿမွင္႔ေပးလိုက္ၿပီး၊ controlled rate သို႔မဟုတ္၊ ramped up to accelerate the load အေနအထားသို႔၊ ခၽက္ၿခင္း ေရာက္ရိွသြားေစပါတယ္။
VDF အသံုးၿပဳထားတဲ႔ starting method ေႀကာင္႔၊ motor မွာ rated torque ရဲ႕ (150 %) အထိ၊ ရရိွလာသလို၊ low speed range အတြင္းမွာ၊ rated current ရဲ႕ (50 %) ပမာဏကိုသာ၊ VDF မွ ဆြဲယူ၊ အသံုးၿပဳပါတယ္။ (150 %) starting torque ဟာ၊ motor full speed ၿဖင္႔ လည္ပတ္သြားတဲ႔ အထိ၊ တည္ၿငိမ္ေနမွာလည္း၊ ၿဖစ္ပါတယ္။
low speed operation ၿဖင္႔ေမာင္းနွင္ေနစဥ္၊ motor ေအးေစမယ္႔ cooling system ဟာ၊ deteriorates အေနနဲ႔ ထိေရာက္မွဳ မရိွတဲ႔အခါ၊ သတ္မွတ္ထားတဲ႔၊ significant torque မရရိွနိဳင္တာကိုလည္း၊ ေတြ႔ရပါတယ္။ အရြယ္အစား ႀကီးမားတဲ႔ motor ေတြမွာ၊ သီးၿခား separately-motorized fan ventilation အေအးခံစနစ္ေတြ၊ ထည္႔သြင္း အသံုးၿပဳသင္႔ပါတယ္။
"Stopping sequence" - VFD အသံုးၿပဳထားတဲ႔ motor ေတြကို၊ ရပ္တန္႔ေစမယ္႔ stopping sequence ဟာ၊ စတင္ေမာင္းနွင္တဲ႔ starting sequence နဲ႔၊ ဆန္႔ကၽင္ဖက္ opposite sequence ၿဖစ္ပါတယ္။ VFD မွတဆင္႔ motor မရပ္တန္႔ခင္၊ decelerate အေနနဲ႔၊ braking torque အနည္းငယ္ၿဖင္႔ load ဖယ္ထုတ္လိုက္သလို၊ frequency နဲ႔ voltage ကိုပါ၊ ေလၽွာ႔ခၽေပးမွာ၊ ၿဖစ္ပါတယ္။ တနည္းအားၿဖင္႔၊ control rate ရဲ႕ေအာက္၊ သို႔မဟုတ္ ramped down အေနနဲ႔ ဆြဲခၽယူၿပီး၊ frequency ဟာ 'zero' သို႔ ေရာက္ရိွသြားတဲ႔ အခါ၊ motor ရပ္တန္႔သြားၿခင္းလည္း၊ ၿဖစ္ပါတယ္။
braking energy ပိုမို လိုအပ္မယ္႔ applications ေတြမွာေတာ႔၊ transistor controlled resistor ေတြကို၊ braking circuit အၿဖစ္တတ္ဆင္ကာ၊ braking energy အေနနဲ႔၊ အသံုးၿပဳႀကပါတယ္။ active front end တနည္းအားၿဖင္႔၊ four quadrant VFD ေတြမွာေတာ႔၊ reverse torque ၿဖင္႔၊ braking load ရယူထားတာ ေတြ႔ရပါတယ္။



Comments